Efficient and Accurate Candidate Generation for Grasp Pose
Por um escritor misterioso
Last updated 17 outubro 2024

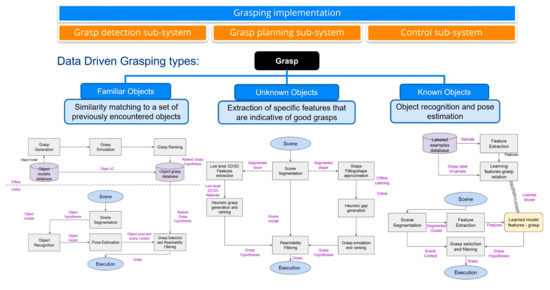
Recently, a number of grasp detection methods have been proposed that can be used to localize robotic grasp configurations directly from sensor data without estimating object pose. The underlying idea is to treat grasp perception analogously to object detection in computer vision. These methods take as input a noisy and partially occluded RGBD image or point cloud and produce as output pose estimates of viable grasps, without assuming a known CAD model of the object. Although these methods generalize grasp knowledge to new objects well, they have not yet been demonstrated to be reliable enough for wide use. Many grasp detection methods achieve grasp success rates (grasp successes as a fraction of the total number of grasp attempts) between 75% and 95% for novel objects presented in isolation or in light clutter. Not only are these success rates too low for practical grasping applications, but the light clutter scenarios that are evaluated often do not reflect the realities of real world grasping. This paper proposes a number of innovations that together result in a significant improvement in grasp detection performance. The specific improvement in performance due to each of our contributions is quantitatively measured either in simulation or on robotic hardware. Ultimately, we report a series of robotic experiments that average a 93% end-to-end grasp success rate for novel objects presented in dense clutter.
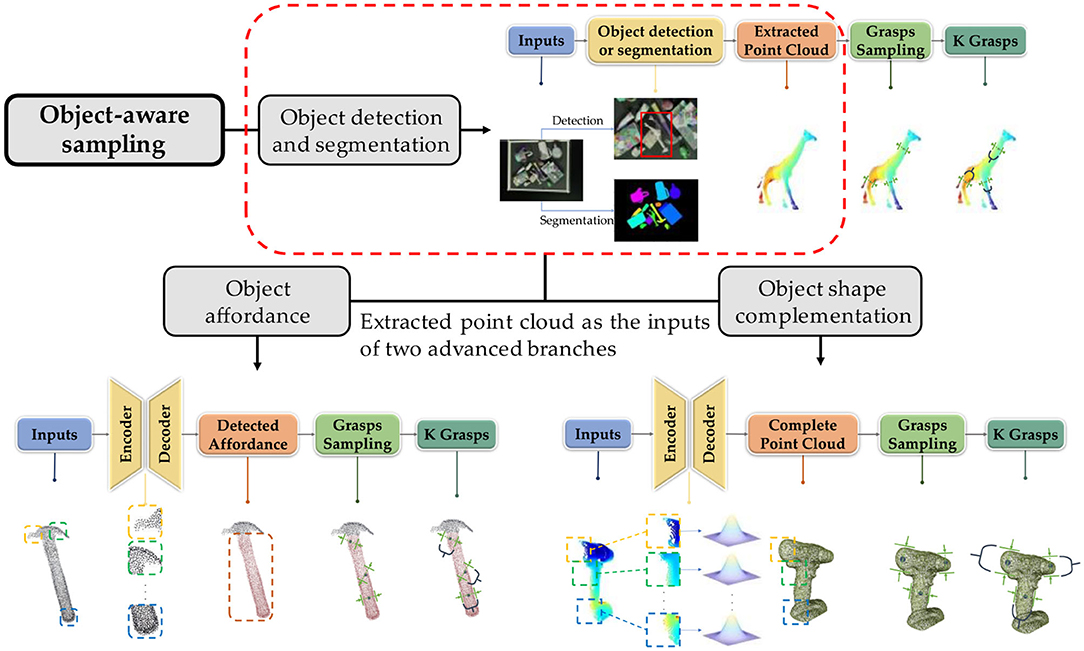
Frontiers Robotics Dexterous Grasping: The Methods Based on
Frontiers Robotics Dexterous Grasping: The Methods Based on

Left: A grasp g is defined by its Cartesian position (x, y, z

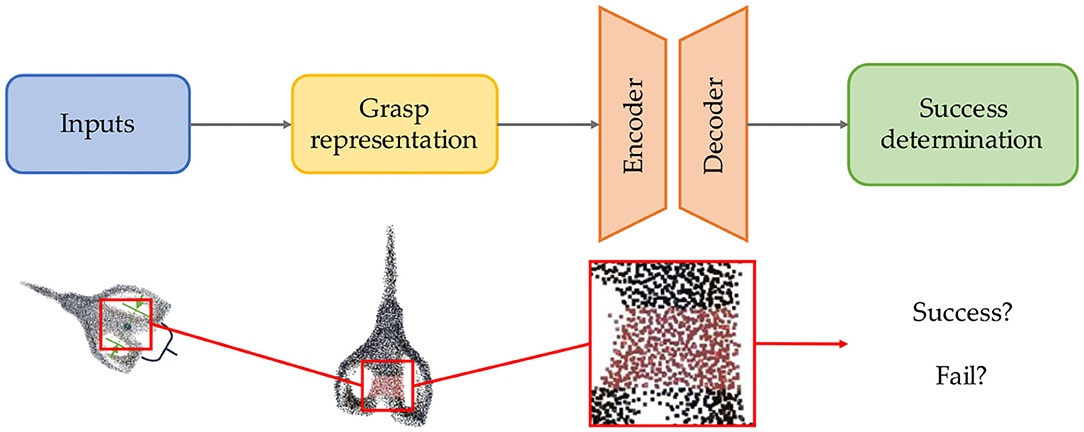
A grasps-generation-and-selection convolutional neural network for

Grasp Pose Detection in Point Clouds - Andreas ten Pas, Marcus
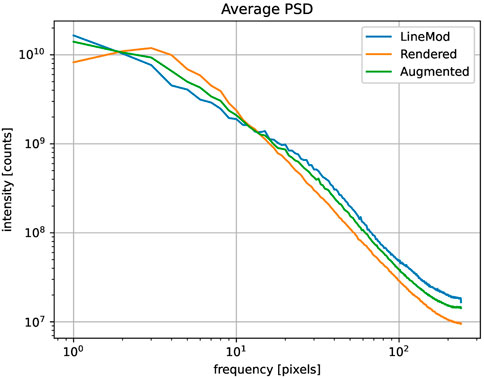
Frontiers 6IMPOSE: bridging the reality gap in 6D pose

Grasp Pose Detection in Point Clouds - Andreas ten Pas, Marcus

PDF] Efficient and Accurate Candidate Generation for Grasp Pose

Vision-based robotic grasping from object localization, object
Gripper pose candidates, with gripper point cloud and special
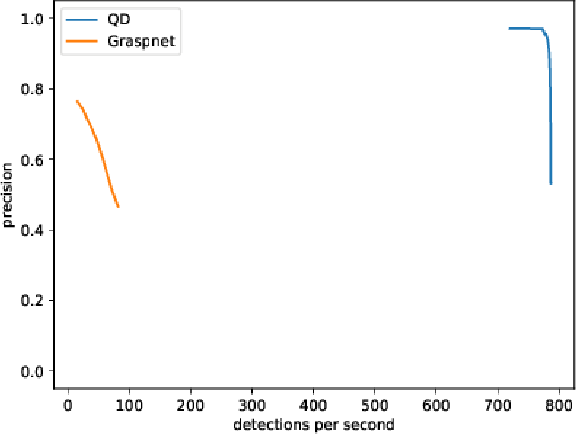
PDF] Efficient and Accurate Candidate Generation for Grasp Pose

Data-driven robotic visual grasping detection for unknown objects
Actuators, Free Full-Text
Recomendado para você
-
 La France au Mozambique on X: 🎓📚🇫🇷⚠️Candidate-se a uma17 outubro 2024
La France au Mozambique on X: 🎓📚🇫🇷⚠️Candidate-se a uma17 outubro 2024 -
Efeito Mais no LinkedIn: ➡ CANDIDATE-SE! ✓ Oportunidade de17 outubro 2024
-
 Required parameters for model SE candidate for the solid‐state17 outubro 2024
Required parameters for model SE candidate for the solid‐state17 outubro 2024 -
 S.E. Cupp: DeSantis is a candidate without a cause or hope – News17 outubro 2024
S.E. Cupp: DeSantis is a candidate without a cause or hope – News17 outubro 2024 -
 Relative gene expression (± SE) of 18 candidate genes by RT-qPCR17 outubro 2024
Relative gene expression (± SE) of 18 candidate genes by RT-qPCR17 outubro 2024 -
 Contratando - a Gi Group Solution17 outubro 2024
Contratando - a Gi Group Solution17 outubro 2024 -
Museu da Pessoa no LinkedIn: Tem vaga nova no Museu da Pessoa! Saiba mais sobre a oportunidade e…17 outubro 2024
-
Se Candidate, mulher! - Crunchbase Company Profile & Funding17 outubro 2024
-
 Oportunidades abertas para Projetos de Compensação Ambiental – IABS, o Instituto Brasileiro de Desenvolvimento e Sustentabilidade17 outubro 2024
Oportunidades abertas para Projetos de Compensação Ambiental – IABS, o Instituto Brasileiro de Desenvolvimento e Sustentabilidade17 outubro 2024 -
 Candidate-se. O candidate-se é uma iniciativa…, by Mídia NINJA, News Quarentena17 outubro 2024
Candidate-se. O candidate-se é uma iniciativa…, by Mídia NINJA, News Quarentena17 outubro 2024


você pode gostar
-
 Basketball Logo design Vector - MasterBundles17 outubro 2024
Basketball Logo design Vector - MasterBundles17 outubro 2024 -
 Pokémon Sword & Shield: The 10 Most Expensive Clothes, Ranked17 outubro 2024
Pokémon Sword & Shield: The 10 Most Expensive Clothes, Ranked17 outubro 2024 -
 Reinier, ex-Flamengo, é anunciado no Girona - Gazeta Esportiva17 outubro 2024
Reinier, ex-Flamengo, é anunciado no Girona - Gazeta Esportiva17 outubro 2024 -
 Simulamos Brasil x Coreia do Sul no FIFA 23; veja resultado e lances17 outubro 2024
Simulamos Brasil x Coreia do Sul no FIFA 23; veja resultado e lances17 outubro 2024 -
 Hvg Humans Vs Gootraxians GIF - Hvg Humans vs gootraxians Kaiju paradise - Discover & Share GIFs17 outubro 2024
Hvg Humans Vs Gootraxians GIF - Hvg Humans vs gootraxians Kaiju paradise - Discover & Share GIFs17 outubro 2024 -
 How Love Saved Max Cavalera17 outubro 2024
How Love Saved Max Cavalera17 outubro 2024 -
 16ª LEILÃO CARUANA&PROMISSÃO - Rancho Promissão17 outubro 2024
16ª LEILÃO CARUANA&PROMISSÃO - Rancho Promissão17 outubro 2024 -
 Superstore': Ator afirma ter ficado 'triste' com a saída da17 outubro 2024
Superstore': Ator afirma ter ficado 'triste' com a saída da17 outubro 2024 -
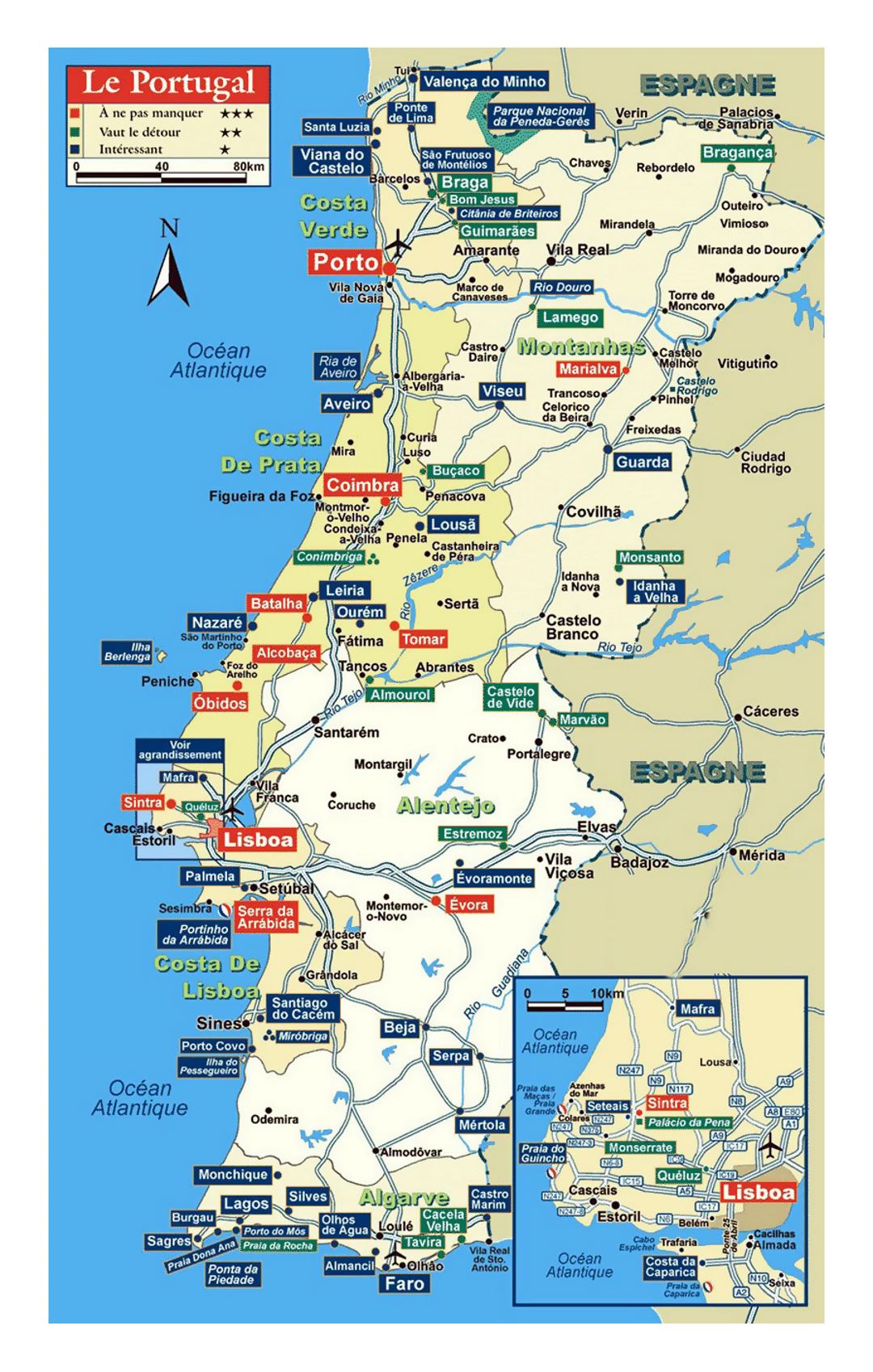 Detailed map of Portugal with roads and other marks, Portugal, Europe, Mapsland17 outubro 2024
Detailed map of Portugal with roads and other marks, Portugal, Europe, Mapsland17 outubro 2024 -
 Middlesbrough vs Olympique Marseille Prediction and Betting Tips17 outubro 2024
Middlesbrough vs Olympique Marseille Prediction and Betting Tips17 outubro 2024