Design and Analysis of a Spherical Joint Mechanism for Robotic Manipulators
Por um escritor misterioso
Last updated 16 novembro 2024

A Light Space Manipulator with High Load-to-Weight Ratio: System Development and Compliance Control

Design and kinematic analysis of a 3-RRR spherical parallel manipulator reconfigured with four–bar linkages - ScienceDirect
Mechanism design and kinematic analysis of a robotic manipulator driven by joints with two degrees of freedom (DOF)
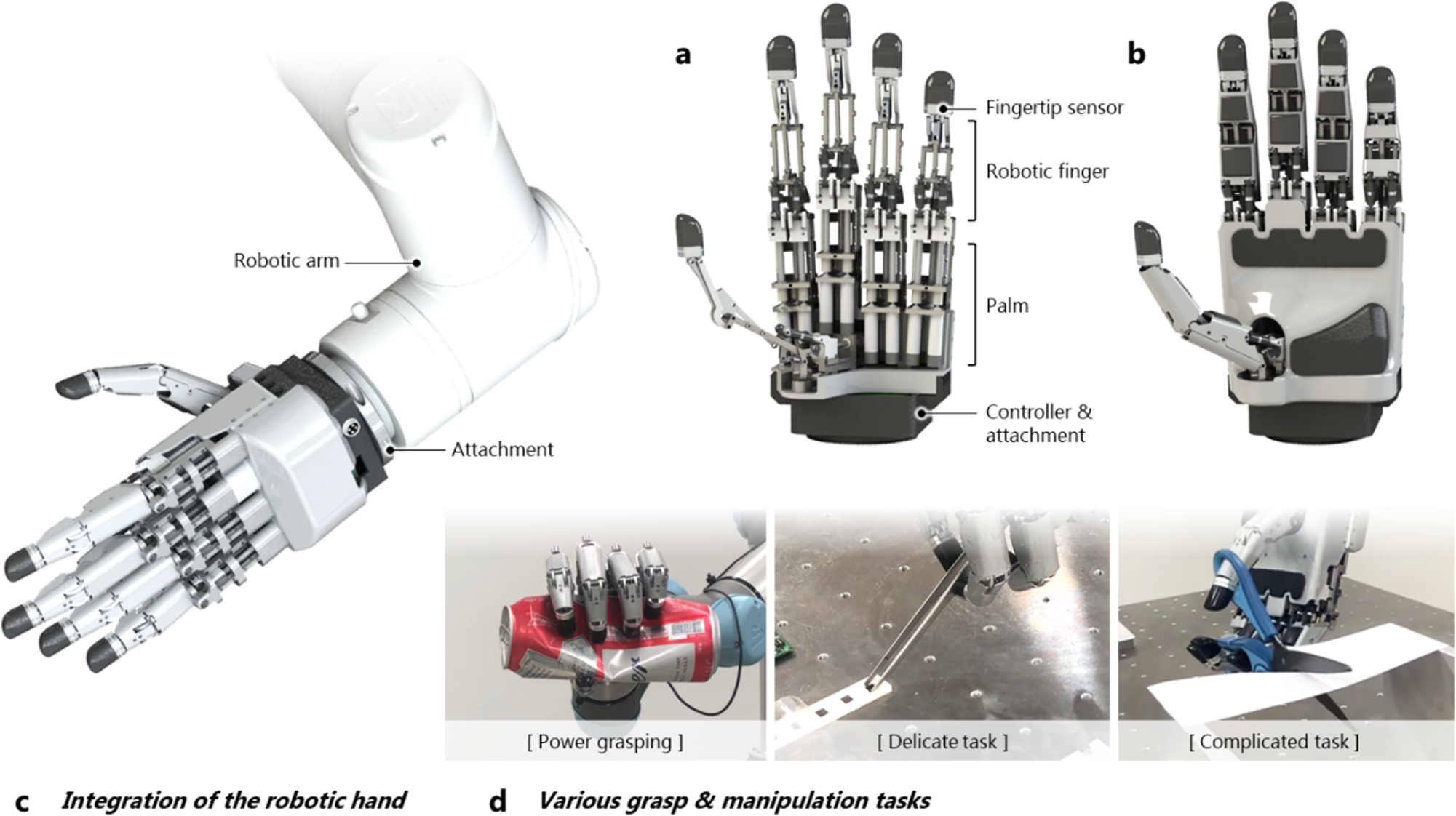
Integrated linkage-driven dexterous anthropomorphic robotic hand

CIMAR
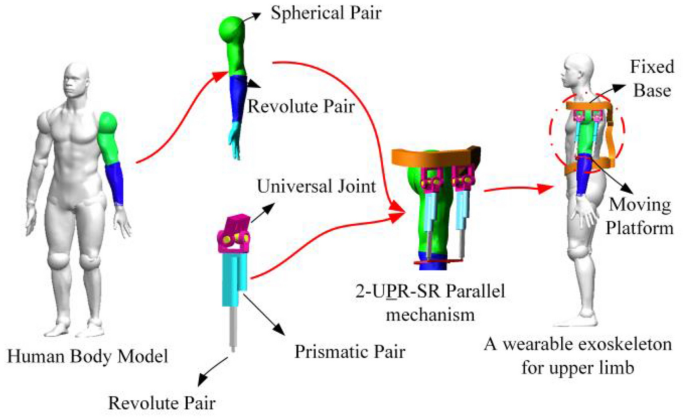
Design and Analysis of a Novel Shoulder Exoskeleton Based on a Parallel Mechanism, Chinese Journal of Mechanical Engineering

Analysis and control for a new reconfigurable parallel mechanism - Guanyu Huang, Dan Zhang, Hongyan Tang, Lingyu Kong, Sumian Song, 2020

Design and implementation of a maxi-sized mobile robot (Karo) for rescue missions, ROBOMECH Journal
Mechanism design and kinematic analysis of a robotic manipulator driven by joints with two degrees of freedom (DOF)

Chapter 2
Frontiers On Aerial Robots with Grasping and Perching Capabilities: A Comprehensive Review

The inverse kinematics of a 7R 6-degree-of-freedom robot with non-spherical wrist - Xuhao Wang, Dawei Zhang, Chen Zhao, 2017
Recomendado para você
-
 The state of stress on a element in plane stress is shown as in the figure.What is the value of σ if the values of the principal stresses are 164 N/mm2 and16 novembro 2024
The state of stress on a element in plane stress is shown as in the figure.What is the value of σ if the values of the principal stresses are 164 N/mm2 and16 novembro 2024 -
 Virtual Labs16 novembro 2024
Virtual Labs16 novembro 2024 -
 At a point in a material there are normal stress of 30N/mm2 and 60N/mm2 tensile,together with a.16 novembro 2024
At a point in a material there are normal stress of 30N/mm2 and 60N/mm2 tensile,together with a.16 novembro 2024 -
 Fitness-for-Service - Acuren16 novembro 2024
Fitness-for-Service - Acuren16 novembro 2024 -
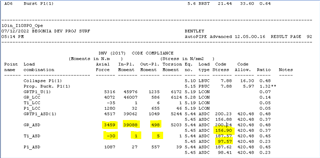 Autopipe Code Stress for DNVGL-ST-F101:2017 - AutoPIPE Forum - AutoPIPE - Bentley Communities16 novembro 2024
Autopipe Code Stress for DNVGL-ST-F101:2017 - AutoPIPE Forum - AutoPIPE - Bentley Communities16 novembro 2024 -
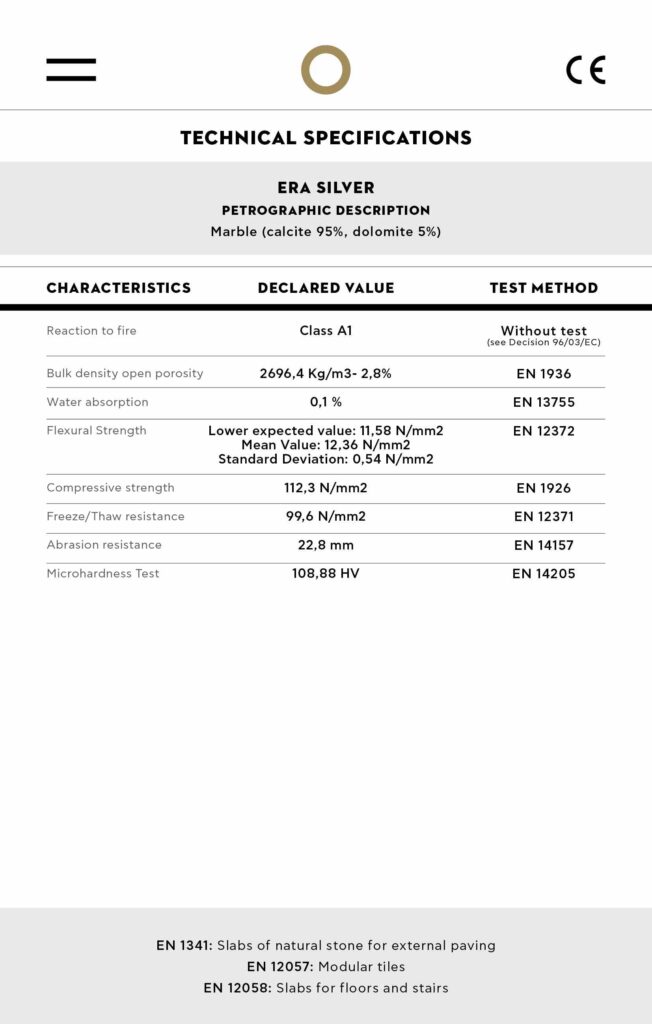 ERA SILVER, Marble, Slabs16 novembro 2024
ERA SILVER, Marble, Slabs16 novembro 2024 -
 Effects of the thickness of cross-laminated timber (CLT) panels made from Irish Sitka spruce on mechanical performance in bending and shear - ScienceDirect16 novembro 2024
Effects of the thickness of cross-laminated timber (CLT) panels made from Irish Sitka spruce on mechanical performance in bending and shear - ScienceDirect16 novembro 2024 -
 Materials Dlubal Software16 novembro 2024
Materials Dlubal Software16 novembro 2024 -
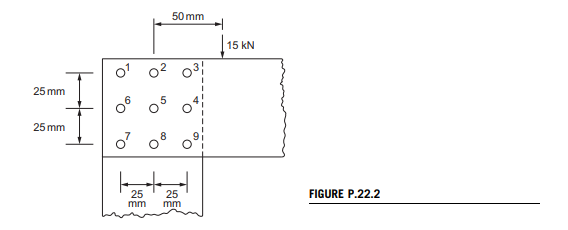 Solved) - The rivet group shown in Fig. P.22.2 connects two narrow lengths (2 Answers)16 novembro 2024
Solved) - The rivet group shown in Fig. P.22.2 connects two narrow lengths (2 Answers)16 novembro 2024 -
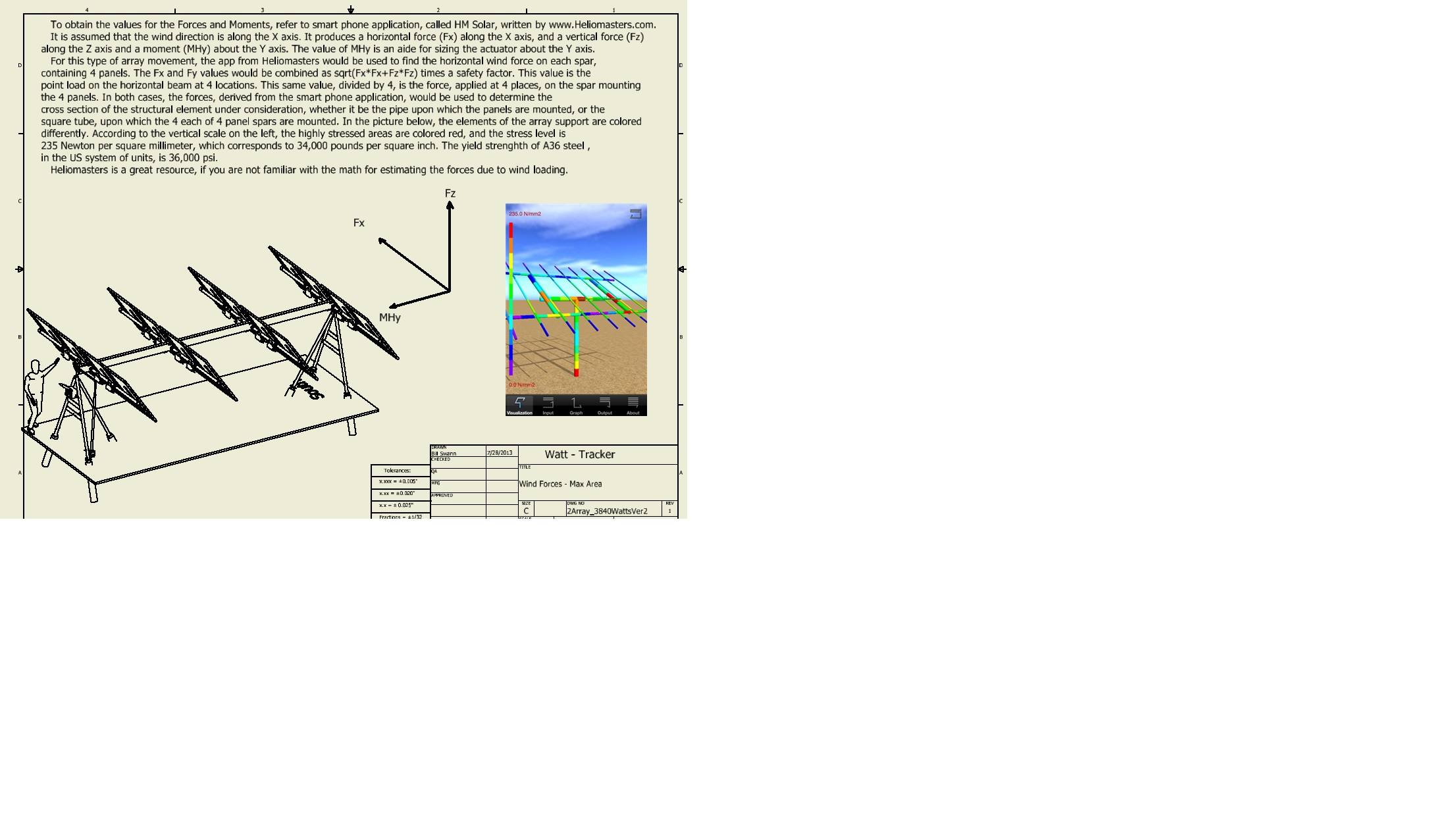 Wind Forces16 novembro 2024
Wind Forces16 novembro 2024
você pode gostar
-
 Britain's Got Talent's Connie Talbot now - unrecognisable transformation and new career - Mirror Online16 novembro 2024
Britain's Got Talent's Connie Talbot now - unrecognisable transformation and new career - Mirror Online16 novembro 2024 -
 Forza Horizon 3 Midia Fisica16 novembro 2024
Forza Horizon 3 Midia Fisica16 novembro 2024 -
 Magnus, Rail Nation Wiki16 novembro 2024
Magnus, Rail Nation Wiki16 novembro 2024 -
 50+ Desenhos de Patrulha Canina para colorir - Como fazer em casa Patrulha canina para colorir, Patrulha canina desenho, Desenhos animados para colorir16 novembro 2024
50+ Desenhos de Patrulha Canina para colorir - Como fazer em casa Patrulha canina para colorir, Patrulha canina desenho, Desenhos animados para colorir16 novembro 2024 -
![Rise of Nations: Extended Edition Steam v1.04 All No-DVD [Codex]](https://megagames.com/sites/default/files/game-images/Rise%20of%20Nations%20Extended%202_0.jpg) Rise of Nations: Extended Edition Steam v1.04 All No-DVD [Codex]16 novembro 2024
Rise of Nations: Extended Edition Steam v1.04 All No-DVD [Codex]16 novembro 2024 -
 Watch, Record, Clip, and Share Gorilla Tag Gameplay16 novembro 2024
Watch, Record, Clip, and Share Gorilla Tag Gameplay16 novembro 2024 -
 X, Alphabet Lore - Alphabet Lore - Sticker16 novembro 2024
X, Alphabet Lore - Alphabet Lore - Sticker16 novembro 2024 -
 It all starts with playing game seriously Ch.130 Page 21 - Mangago16 novembro 2024
It all starts with playing game seriously Ch.130 Page 21 - Mangago16 novembro 2024 -
 This USB-C tester will tell you if your Apple chargers are genuine16 novembro 2024
This USB-C tester will tell you if your Apple chargers are genuine16 novembro 2024 -
Samsung Galaxy A54 256GB Black 5G Coolblue - Before 15:00, delivered tomorrow16 novembro 2024
